2014/05/30
We performed the engineering run of the HinOTORI telescope.-- by Ryosuke Ito, Yuka Kanda, Yuki Moritani, a friend of Yuki and Yousuke Utsumi.
Engineering exposure
We took a banch of exposures with 3 seconds of integration time.
We confirm the following things:
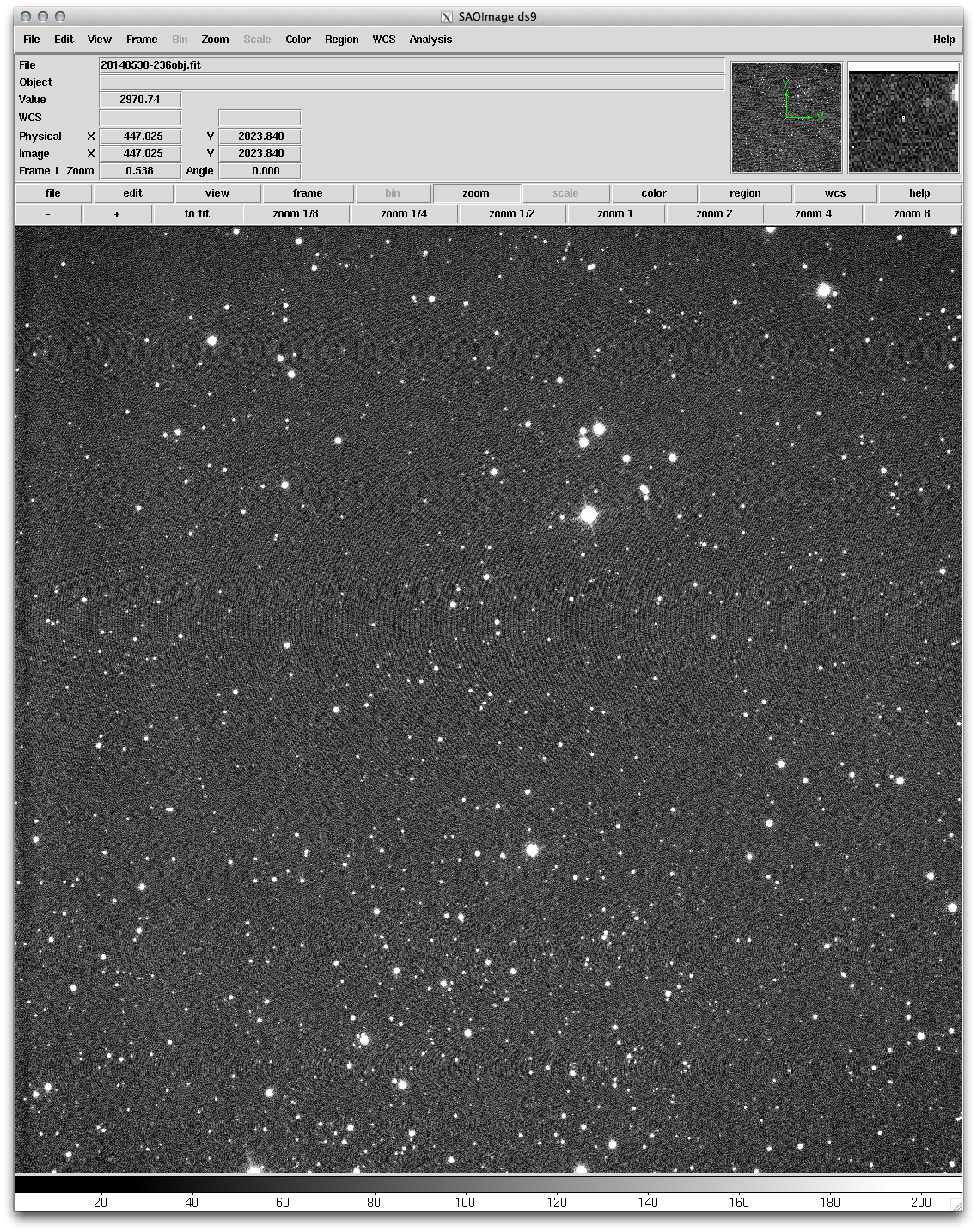
- The pixel scale is 0.675arcsec/pixel in the center of the field of view without any corrector lens system. The result is roughly (~1%) consistent with the design. We still need to conduct further investigation.
- Our camera has a 13.5um of pixel size and has 2048px of width. So our camera should have 23.1x23.1 arcmin of FoV at the cassegrain focus and we confirmed that at this moment.
- The physical length from the backfrange to the detector is about 375mm (say +/- 5mm) when focus z is 9883steps in the operation window. The nominal step is 20000, ranging between 0-40000. When the nominal position the backfocus will be shorterned ~10mm.
- We see the almost identical measurement of the FWHM for the stars between HONIR and HinOTORI. At this time, the focusing of HONIR was measured in J-band. However, we see the slightly better performance than the HONIR.
Console
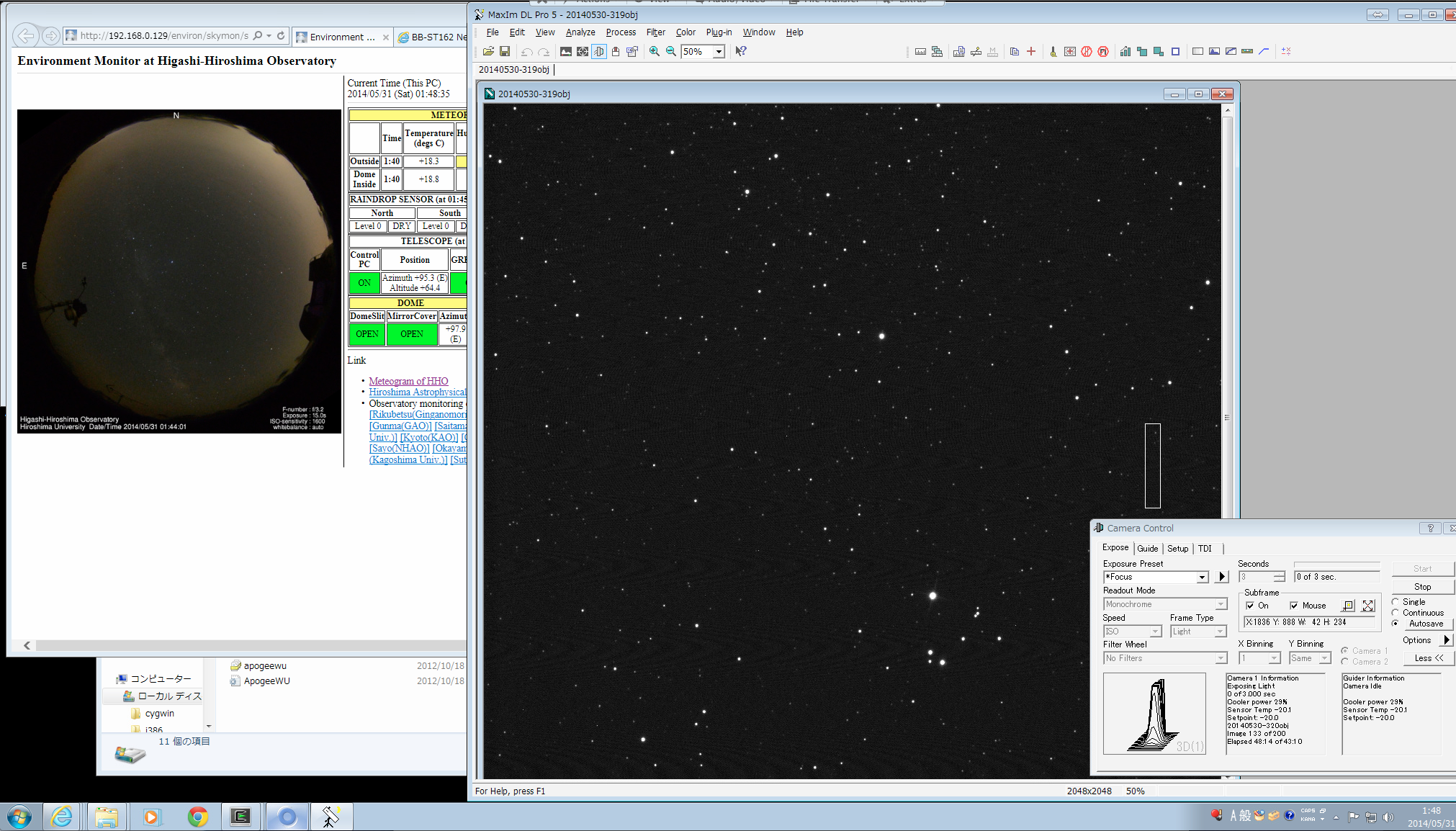
Now we haven't yet made the observation control system, especially, CCD controlling sytem. So we need to use Windows. It is really tough work.
WCS
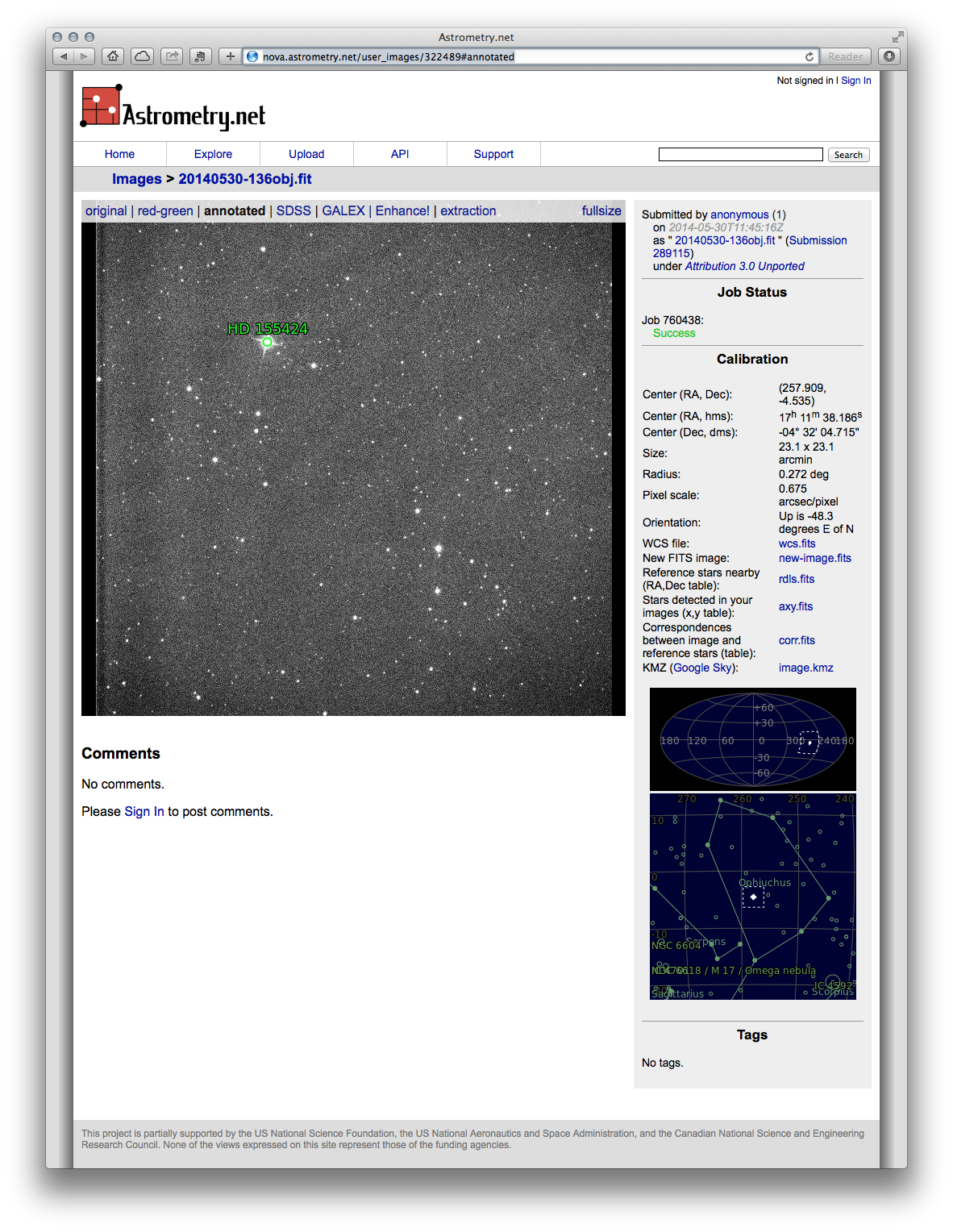
Astrometry.net kindly provides really useful capability to perform WCS analysis on the web based system.
Seeing evaluation
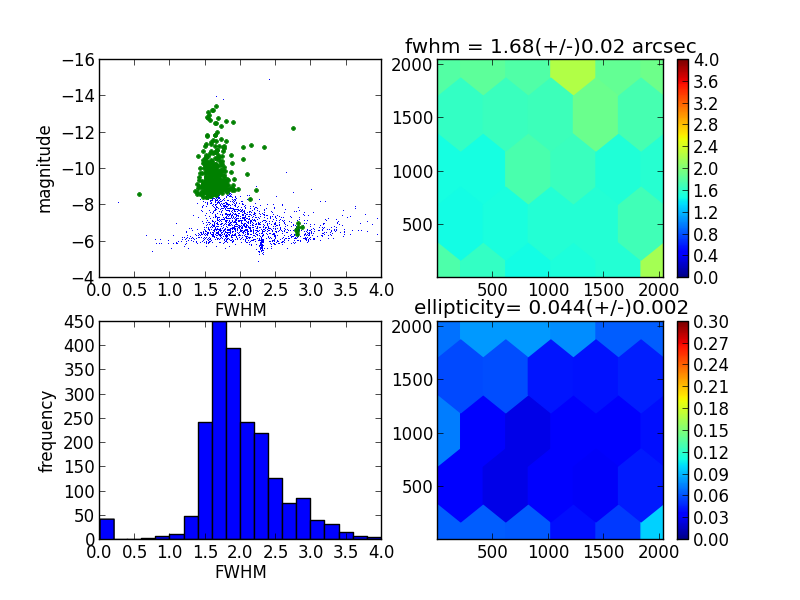
One of example describing the image quality. Green dots are regarded as stars and then used for the density plots. Of course, the photometric calibration has not been yet performed.
source code
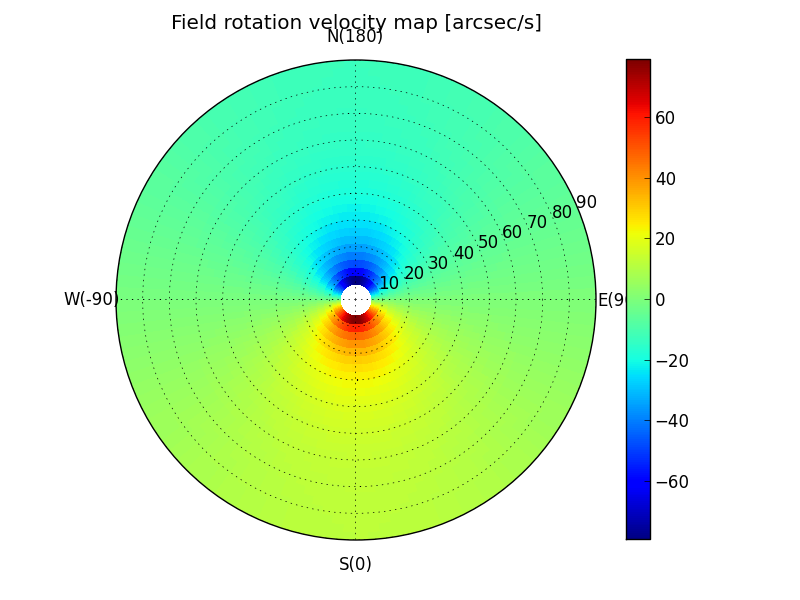
Evaluate the field rotation effect
source code
We don't have the image rotator although we mounted the HinOTORI telescope on the Kanata Az-El mount. We should care about this. Here we show the rotation speed map of the field to see the level. From the field rotation velocity map, the rotation velocity is low when objects just located around east or west.
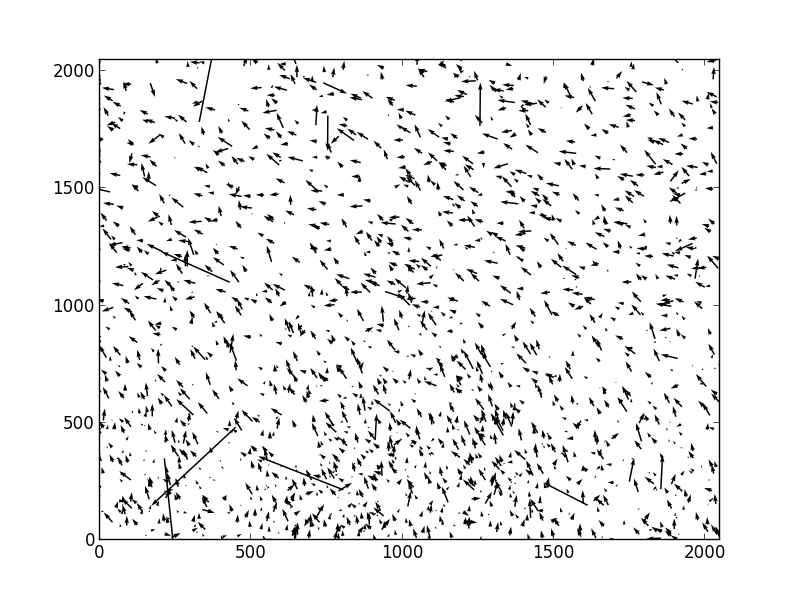
We took positional differences for each stars between the current and the next frames. We remove zero-lag and larger error objects than 100pixel. Then we took an arithmetic mean and a standard deviation. They look having the same direction. It means the origin of the field rotation is outside the field of view. Here we evaluate the offset from the center. For example, El=60 and Az=0 gives 1.2e-4 rad/s of the angular velocity of the field rotation. From the next figure, we see 0.2 arcsec/s of shift. It gives 1700 arcsec which corresponds to a pointing difference between HinOTORI and Kanata.
source code
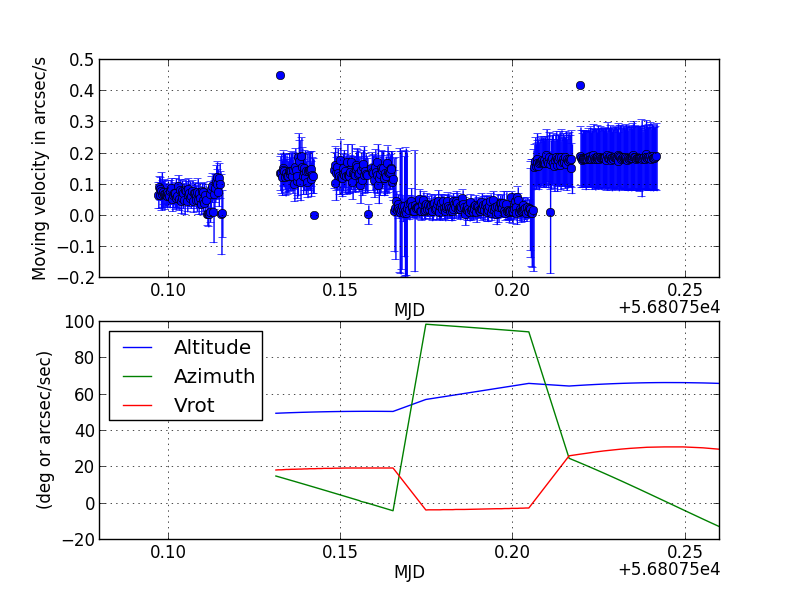
Here we show pointing differences between exposures (moving velocity). The pointing differences are small when the azimuth towards the east (100) as we expetcted.
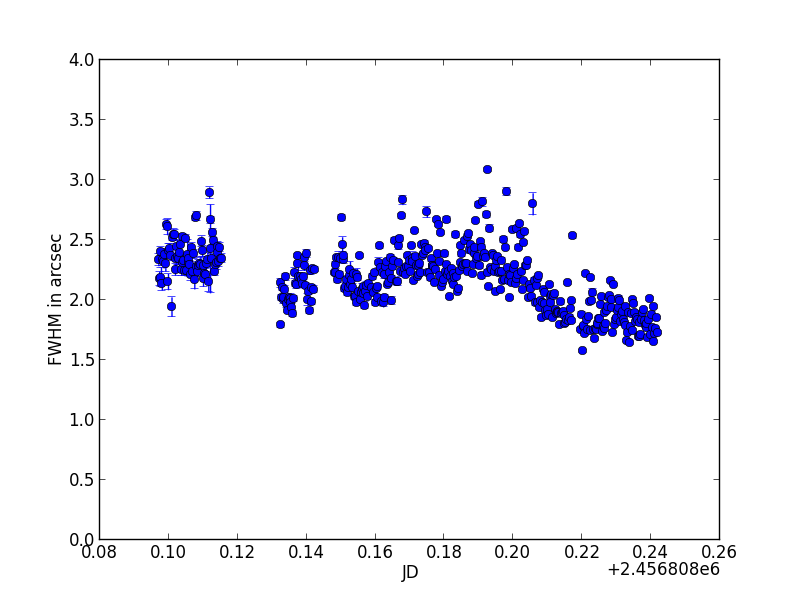
Variation of the seeing
source code
We measured seeing size is around 2 arcsec. As we've seen in the previous section, a tracking error coming from the absence of the field rotator will reach 0.6 arcsec at the maximum when one take 3 seconds of integration. Maybe this result is not affected by the tracking error.
Summary
- Seems that it is possible to conduct the optical performance test with this configuration
- Use just east or west sky region
- No dithering
- We don't need to purchase the instrument rotator!!!